2.1 Specifications
Here we go with the specifications of the Kikobot C1. This robot has been engineered for precision, adaptability, and smooth integration into various work environments. Its design is focused on enhancing efficiency and performance.
The technical specifications of the Kikobot C1 provide a detailed overview of its capabilities and design features. The table below highlights its key specifications, showcasing the precision, power, and versatility of our cobot :
| Parameter | Value |
|---|---|
| Weight | 900 gm |
| DOF | 6 |
| Max Payload | 250 gm |
| Max Working Radius | 360 mm |
| Repeatability | ±1.0 mm |
| Material | 3D Printed body PLA/ABS |
| Power input | 100V – 240V AC, 50/60 Hz |
| Nominal voltage | 12V DC, 10A |
| Nominal power | 120W |
| Indoor/Outdoor Use | Indoor |
| Installation method | Floor mounting |
| Base dimensions | 11011093 mm |
| Working Temperature | 0°C – 50°C |
| Communication Method | Serial USB TYPE C |
| Control software | Kikobot C1 Studio |
a. Structural Size Specifications
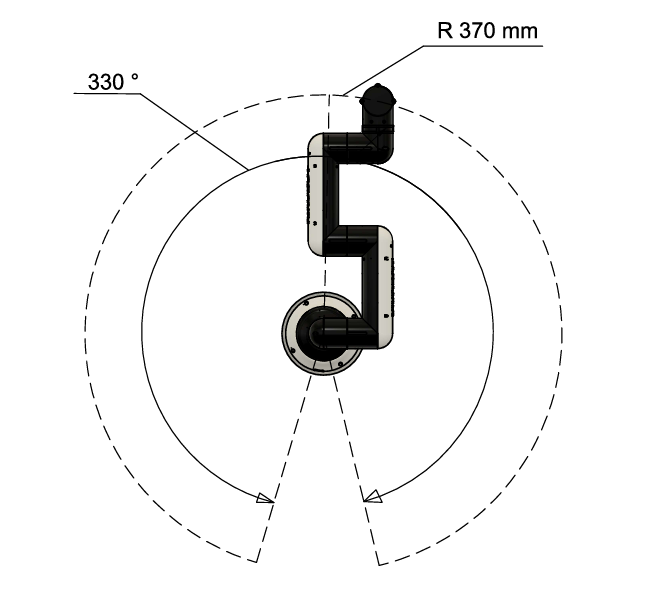
i. Workspace
The figure below shows the accessible workspace by the Kikobot C1 :
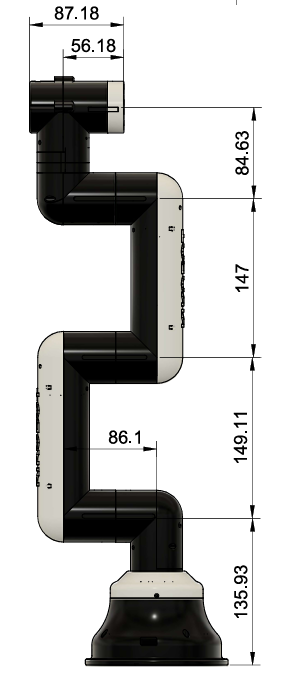
ii. Manipulator dimensions
The figure below shows the dimensions of the Kikobot C1 :
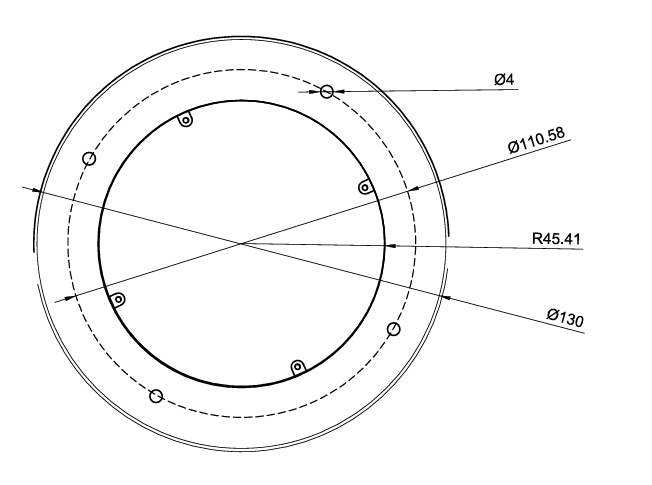
iii. Manipulator base dimensions :
b. Joint Limits :
The figure below shows the joints of the Kikobot C1 :

The table below shows the joint working limits of the Kikobot C1:
| Joints | Limits |
|---|---|
| Joint working limits (J1) | -165° to +165° |
| Joint working limits (J2) | -125° to +125° |
| Joint working limits (J3) | -140° to +140° |
| Joint working limits (J4) | -140° to +140° |
| Joint working limits (J5) | -140° to +140° |
| Joint working limits (J6) | -175° to +175° |
| Maximum joint speed | 150°/s |